建筑钢筋的切割加工过程中的机器人导入
以前,少量多品种的钢筋3点切割加工的熟练工是通过气体焊接机器手动操作,熟练工的不足、加工速度、加工精度、生产量的不足等等,已经无法满足用户的需求。

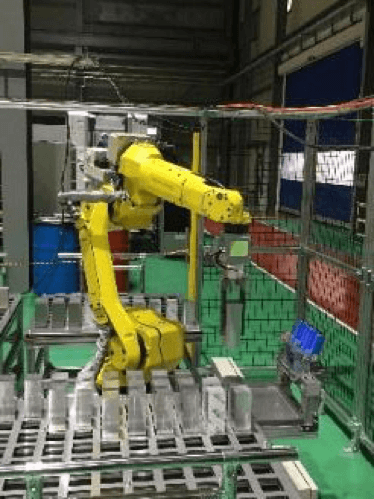
手动焊接作业
为了解决这些问题,解决人手不足和生产效率的提高,采用了等离子加工机器人的导入。

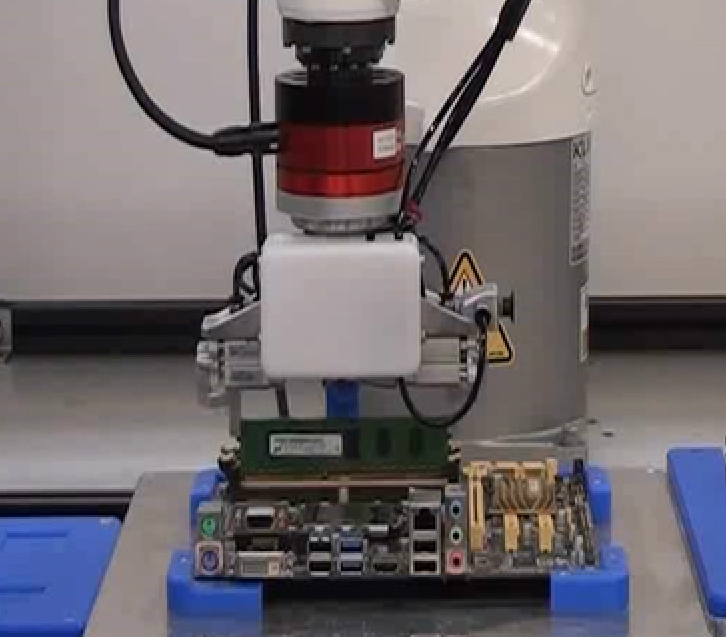
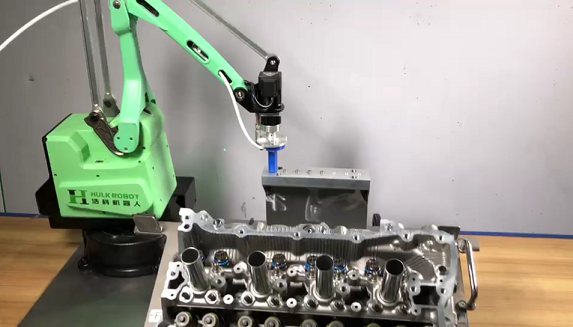
机器人进行自动切割加工
开发等离子加工机器人,不似以前彻底地拘泥于软件开发这一块。根据CAD数据的直接输入,计划有步骤的时间设置,多品种少量生产成为可能。同时,大型的钢筋也能对应,在定位的方法上导入触摸传感器,在任意位置上可以进行加工设置。
其结果,工作设定的时间,反转的时间可以大幅度削减。
·根据机器人的导入,可以对应少量多品种的切割
·根据CAD数据的应用,产量飞跃发展