三维等离子体机器人在建筑钢材切削加工中的应用
引入之前
l 手工制作


引入之后
l 将CAD数据捕获到机器人
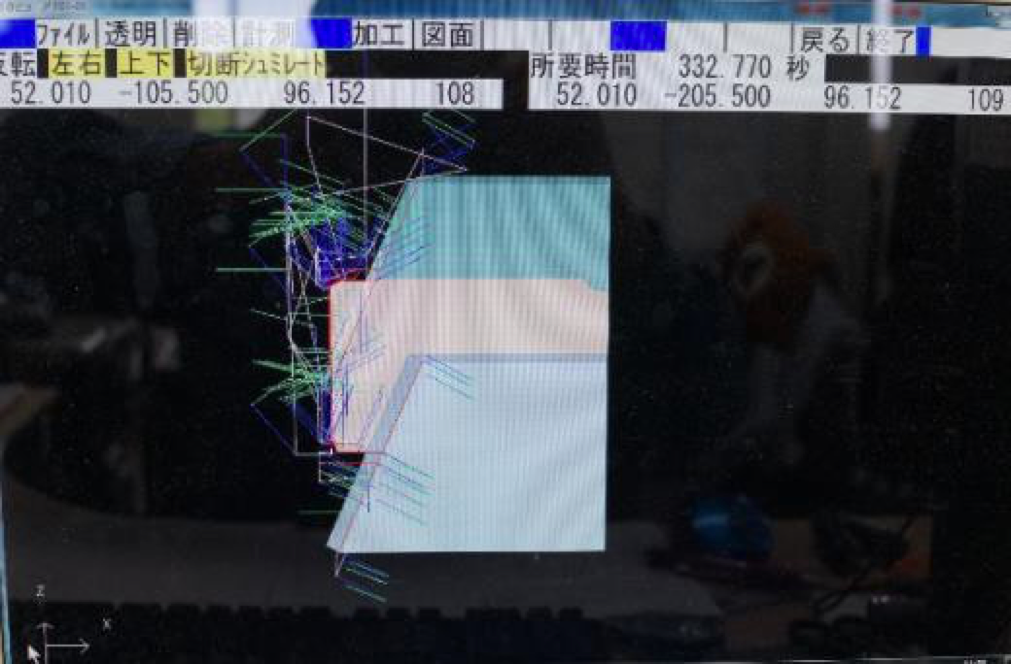
l 用触摸传感器感应

l 机器人自动执行切割过程
项目概要
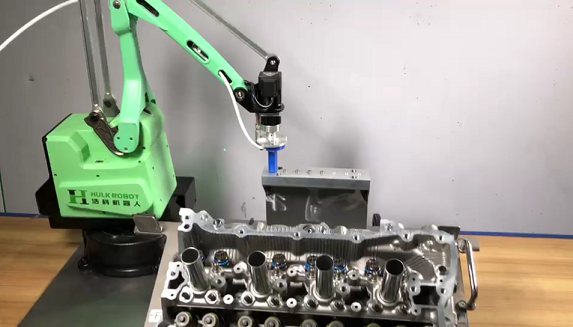
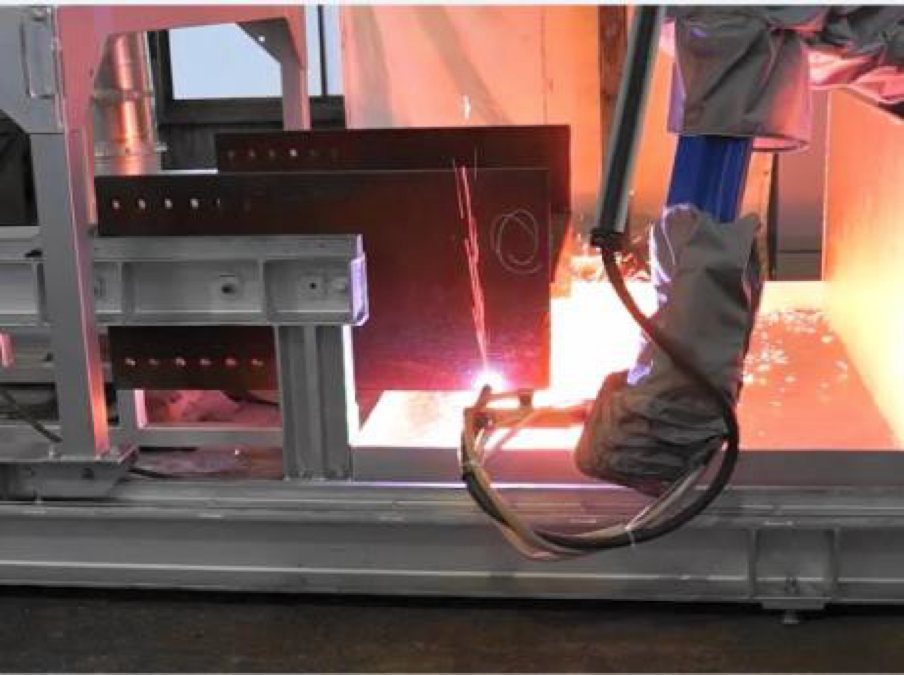
传统上, 熟练的工人用手工用气体熔化机手动进行各种钢种的三维切割过程,并且满足当前用户的需求,如熟练工人不足,加工速度,加工精度,生产量等。它变得陈旧了。
为了解决这些问题,劳动力短缺和提高劳动生产率我们开发并引入了三维等离子体处理机器人。
通过我们专有的等离子处理机器人,我们坚持彻底的软件开发,从而消除了过去需要的教学任务。
通过直接处理CAD数据等,设置所需的时间就会丢失,从而可以生产多种小批量的产品。此外,通过在定位方法中安装触摸传感器,以便能够应对大型钢架,可以在任意位置处理作业场所。
因此,可以大大缩短工作时间和倒车所需的时间。
影响范围
劳动生产率 | 3次 | |
人数 | 1人 1人 | |
工作时间 | 8个小时 8个小时 | |
产量 | 8件 24件 | |
其他影响 | l 替代/支持辛勤工作 l 提高质量 | |